
Alex Williams pulled off an incredible engineering project. He developed an Autonomous Underwater Vehicle (AUV) which uses a buoyancy engine rather than propellers as its propulsion mechanism and made the entire project Open Source and Open Hardware.
The design aims to make extended duration missions a possibility by using very little power to move the vessel.
What’s as remarkable as the project itself is that Alex made a goal for himself to document the project to the level that it is fully reproducible. His success in both of these areas is what makes the Open Source Underwater Glider the perfect Grand Prize winner for the 2017 Hackaday Prize.We got to sit down with Alex the morning after he won to talk about the project and the path he took to get here.
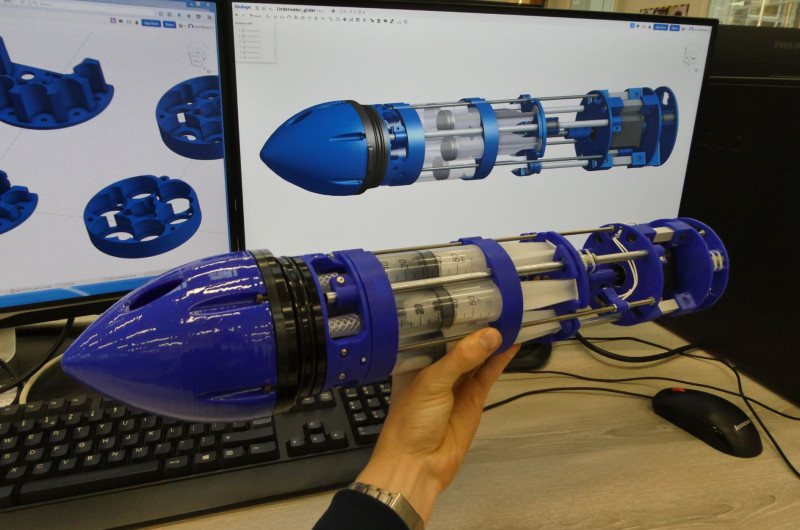
The bouyancy engine Alex speaks about is located in the nose of the glider. He was clever to choose medical syringes as an off-the-shelf option for moving water in and out of the glider to affect boyancy. They’re cheaply and readily available, and designed for moving liquids in exactly the way needed for the project. Alex collects six of them together and moves the plungers in union with a single machine screw at the center. After comparing tests between this and a peristaltic pump design he found that the syringe design operates more efficiently and to us it appears to be much less complicated to build.
This platform is designed to be used for autonomous tasks like data acquisition over large areas in the ocean. Since it doesn’t use active locomotion…
The post An Interview with Alex Williams, Grand Prize Winner appeared first on FeedBox.