Author: Elliot Williams / Source: Hackaday

An eggbot is probably the easiest introduction to CNC machines that you could possibly hope for, at least in terms of the physical build. But at the same time, an eggbot can let you get your hands dirty with all of the concepts, firmware, and the toolchain that you’d need to take your CNC game to the next level, whatever that’s going to be.
So if you’ve been wanting to make any kind of machine where stepper motors move, cut, trace, display, or simply whirl around, you can get a gentle introduction on the cheap with an eggbot.Did we mention Easter? It’s apparently this weekend. Seasonal projects are the worst for the procrastinator. If you wait until the 31st to start working on your mega-awesome New Year’s Dropping Laser Ball-o-tron 3000, it’s not going to get done by midnight. Or so I’ve heard. And we’re certainly not helping by posting this tutorial so late in the season. Sorry about that. On the other hand, if you start now, you’ll have the world’s most fine-tuned eggbot for 2020. Procrastinate tomorrow!
I had two main goals with this project: getting it done quickly and getting it done easily. That was my best shot at getting it done at all. Secondary goals included making awesome designs, learning some new software toolchains, and doing the whole thing on the cheap. I succeeded on all counts, and that’s why I’m here encouraging you to build one for yourself.
What is an Eggbot?
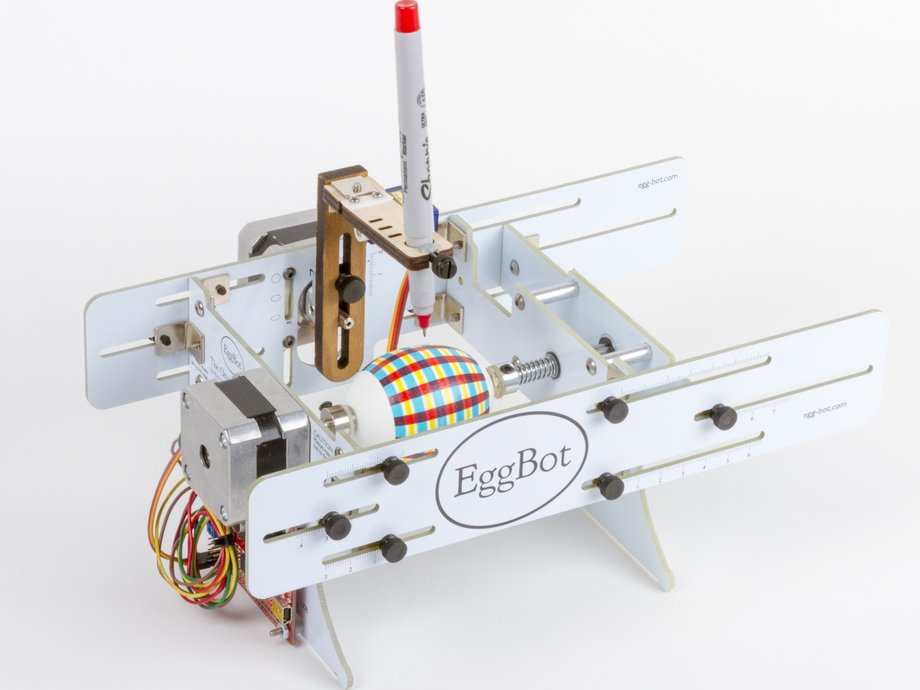
Eggbots first entered my consciousness through Evil Mad Scientist’s EggBot kit. It’s the most refined that we’ve seen, and if you’re making your own machine it’s worth looking at where EMSL include adjustability in their design.
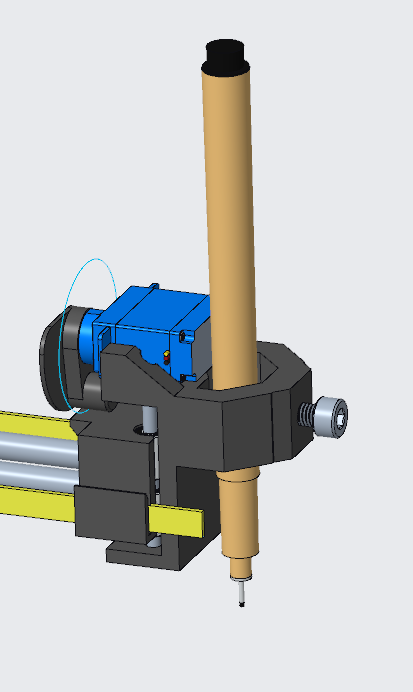
But as promised, even a fancy one like this doesn’t have too much going on with the hardware side of things. Your bare-bones version only needs two stepper motors, a micro servo motor to lift the pen, maybe a skateboard bearing and some threaded rod here and there to make it adjustable and smooth. And of course, you’re going to need the electronic bits to drive it all.Conceptually, one stepper rotates the egg around its axis of symmetry, the other rotates the pen’s axis so that it can travel north-south, and the servo lifts up the pen between strokes.
For motors, I used what I had on hand, and you probably can too. I bought a big handful of these discount NEMA 17 steppers from a local German supplier, and although they were cheap, they’re probably over-spec for an Eggbot with 0.34 Nm worth of torque. I’ve seen machines that use the ridiculously cheap 28-BYJ48-type gear motors as well, so even those could be made to work. The number of steps is key, and more is better, so you probably don’t want to use any old pancake stepper you find, for fear that you’ll get a low-step variant. For the pen, a servo is a servo, but you want a small one.

The particular frame I ended up with was a variant of this 3D model but redesigned to print without supports. It’s maybe not as flexible as the original, but tossing someone else’s design at a 3D printer is definitely the low-hassle way to go: download, slice, print, and come back in ten hours. If you’ve got a lot of threaded rod lying around, and want the extra flexibility, I’d consider this battle-tested frame or one of its derivatives.
But even if you don’t have a 3D printer, the mechanics of an eggbot make very light demands on the home builder. All motors are driven directly, so there’s no gearing to worry about. Eggs are light, so you don’t need to sweat about torque. And there’s almost no side-load on the pen tool, so you don’t have to worry particularly about frame rigidity. Have a look at [Zaggo]’s SphereBot made of MDF scraps, or [derwassi]’s CNC Eggbot made of thin plywood for inspiration.

The electronics include two stepper motor drivers and a microcontroller to run the show. I went online to look for Pololu-style A4988 stepper drivers, because I’d used them ages ago in building a 3D printer. I remembered them to cost around $10 each, so I was looking at $20 and a bunch of DIY work. Instead, I found a complete kit with “Arduino”, shield, four (4!) stepper drivers, and even a USB cable thrown in for €15, delivered. Search “arduino grbl cnc shield”, do not collect $200, do not pass Go, and head directly to checkout. Maybe pick up two, because they’re an incredible bargain, and you can’t beat it for development time spent on the electronics side of things. Without the “Arduino” you can get one for €7 and use whatever micro dev board you’ve got sitting around, but you’ll have to do the wiring yourself.
I splurged. After all, minimizing my time and effort spent on the project was the prime directive. Other than soldering compatible headers to my servo motors, everything was plug-and-play. If you haven’t bought oddball servos, you might not even need to warm up the iron. Splurging unfortunately meant waiting, though, and I sat around for a week and a half with a printed and assembled eggbot on my shelf, waiting for electronics, cursing my laziness. Total human time spent on the project, under two hours, and most of that was browsing 3D printed frames online and re-designing some 3D-printed parts to work around my oddball servos. So I guess the waiting pays off.
Wares: Firm- and Soft-
“And the rest is a simple matter of software.” While sourcing all the parts and building the bot took two hours, I spent at least that long looking for the right combination of software and firmware to drive this thing. Learning to use what would become a toolchain took four or five more. I’ll spare you as much of that learning curve as possible.
The plan was to have the eggbot deal in plain-jane G-code because it’s the lingua franca of CNC machines. This is where we part ways with Evil Mad Scientists, because they use a proprietary protocol, even if it is open, well-documented, and frankly pretty well thought out. If you just want eggs pronto, that’s a good way to go. But if you want to apply what you learn here to any other CNC machines, from DIY 3D printers to the fanciest of multi-axis industrial milling machines, you’re going to want to deal in G-code. I needed an ATmega328 G-code interpreter.
Since the dirt-cheap motor-driver board I’d bought was designed to run with GRBL, that was an easy choice. As a bonus, all of my 3D printers use Marlin, so I got to learn something new. The only catch is that GRBL wants to exclusively drive stepper motors, and we have…
The post What Can You Learn From an Eggbot? appeared first on FeedBox.